AgroBot: AI-Powered Precision Weeding for a Sustainable Agricultural Future in Bangladesh
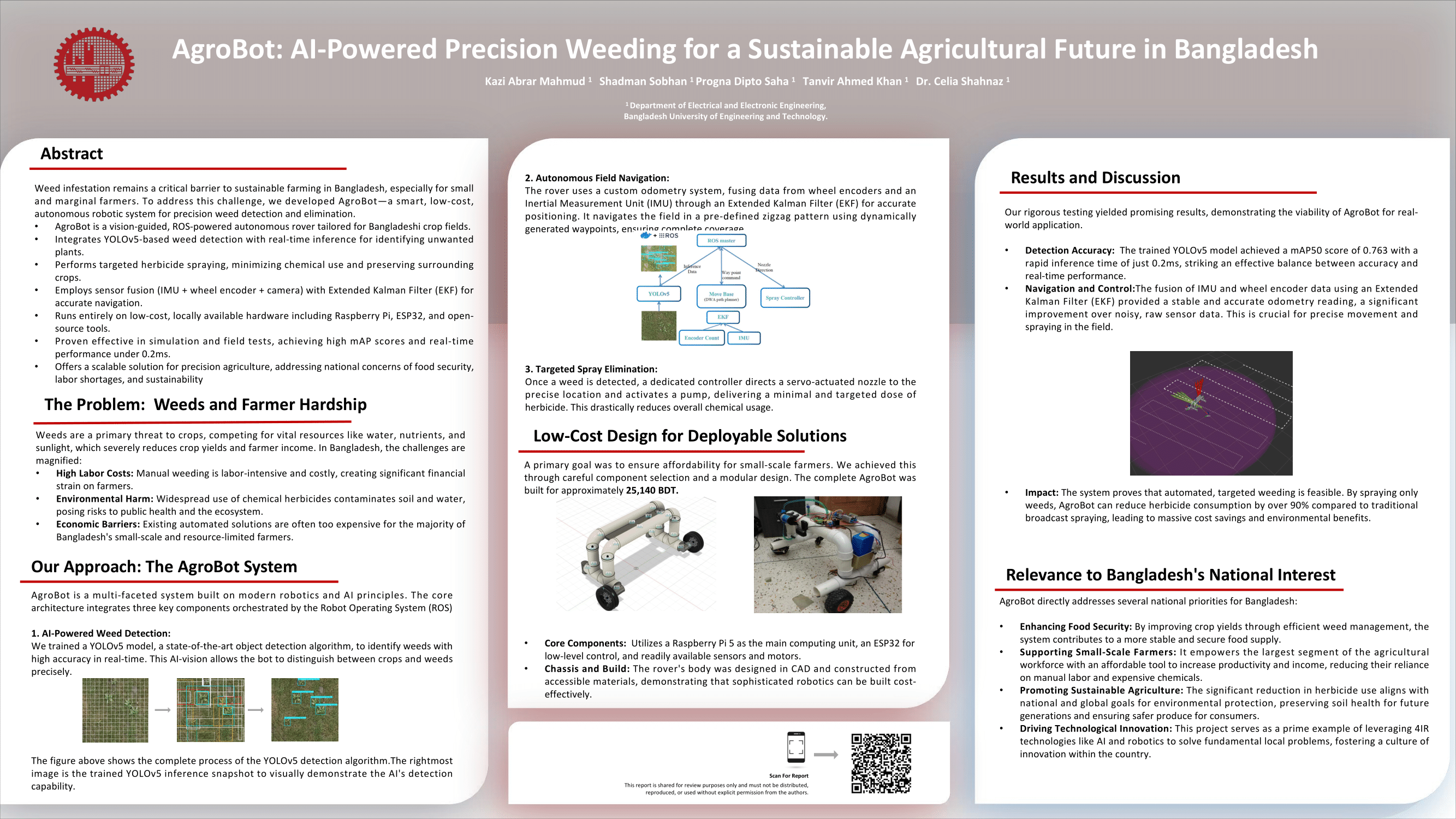
Weed infestation significantly hampers agricultural productivity in Bangladesh, especially for small and marginal farmers. AgroBot is a low-cost, autonomous precision weeding robot designed using ROS and AI-based weed detection (YOLOv5) to address this problem.
Key features:
- Vision-guided weeding with YOLOv5 for real-time plant classification.
- Automated navigation using wheel encoder + IMU fused by an Extended Kalman Filter (EKF).
- Targeted herbicide spraying mechanism to minimize chemical use.
- Cost-effective deployment using Raspberry Pi and ESP32 (~25,140 BDT total cost).
Our system achieved a mAP50 score of 0.763 with <0.2ms detection latency, and showed a 90% reduction in herbicide usage during tests.
This work contributes to:
- Supporting small-scale farmers with affordable robotics.
- Reducing labor and environmental impact from traditional weed control.
- Advancing Bangladesh’s national goals in food security, smart agriculture, and technological innovation.
📄 View Poster Below: